(1) Preparation prior to servo parameter initialization
Before servo parameter initialization, check the following:
- Servo motor model (Example: β 6/2000)
- Amount of travel per motor rotation (Example: 10 mm/motor revolution)
- Number of pulses per motor rotation (Example: 10000 pulses/motor revolution)
A detection unit is determined from 2 and 3.
Detection unit = (Amount of travel per motor rotation)/(number of pulses per motor rotation)
(2) Procedure for servo parameter initialization
- Turn on the power to the servo amplifier.
- Turn on the power to the host controller in the emergency stop state.
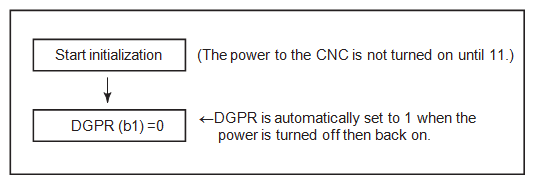
- Perform parameter initialization from the host controller. Set values for the parameters listed below. (See 5 to 10.)
When this bit is set to 0, a power disconnection request alarm (alarm No. 0) is issued. However, 5 through 10 below can be set.
Example of setting: 10μ m detection in a semi–closed loop
Example of setting : 1/100 degree detection with a deceleration ratio of 10:1 for a rotation axis
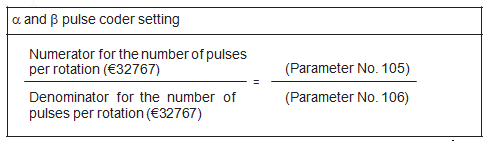
Every time the motor makes one rotation, the table rotates through 360/10 degrees. For each degree of table rotation, 100 position pulses are required. The number of pulses per motor rotation is 360/10 x 100 = 3600 pulses, so set the following: Numerator = 3600, Denominator = 1